AquaPose
computer-vision
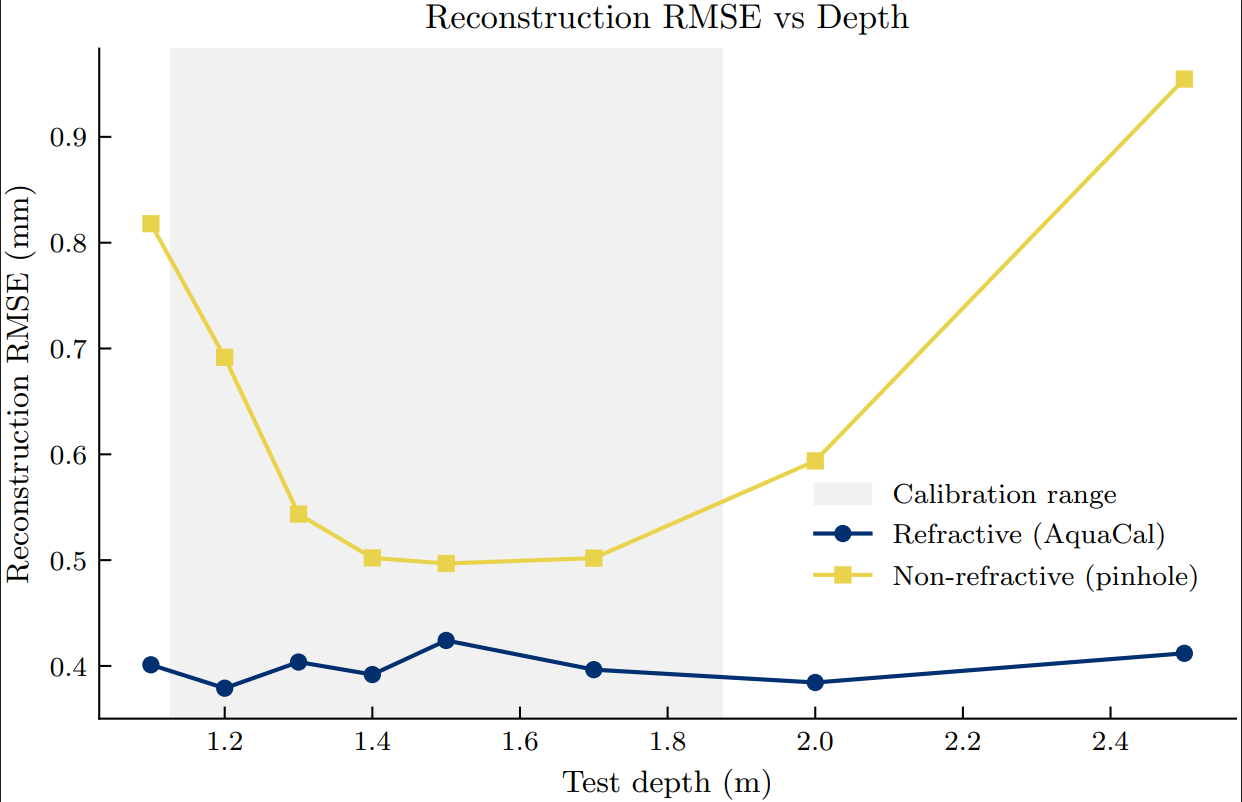
3d-reconstruction
multi-object-tracking
pose-estimation
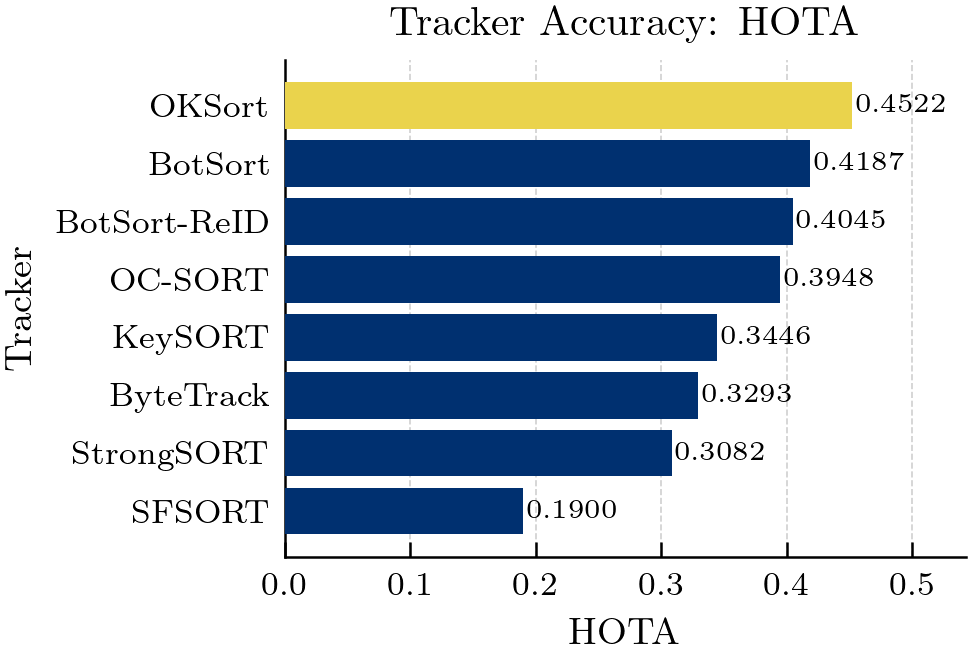
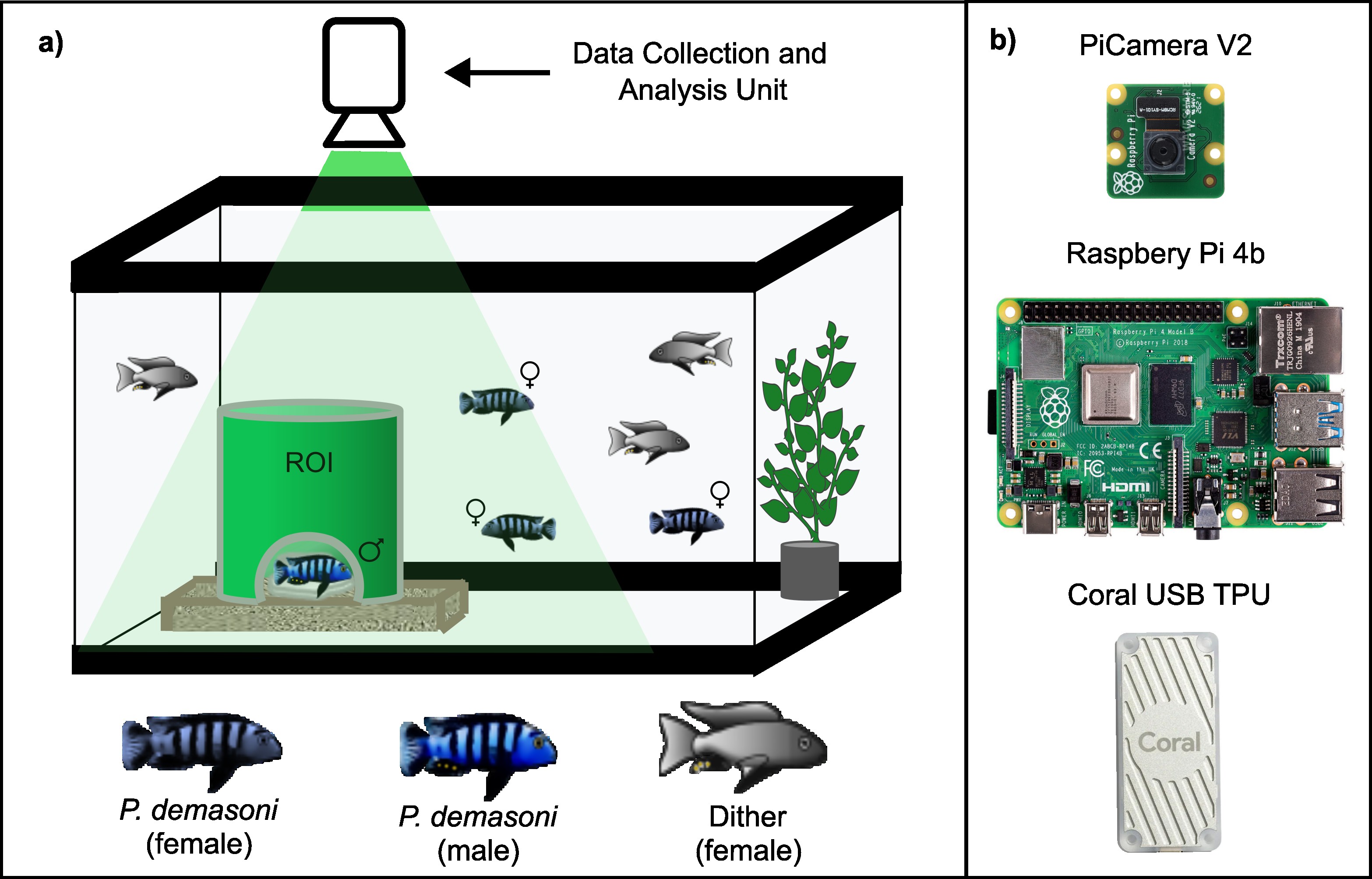
End-to-end 3D pose tracking for many near-identical animals behind a refractive interface, with identity maintained using geometry alone — no appearance features required.